| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | |||
| 5 | 6 | 7 | 8 | 9 | 10 | 11 |
| 12 | 13 | 14 | 15 | 16 | 17 | 18 |
| 19 | 20 | 21 | 22 | 23 | 24 | 25 |
| 26 | 27 | 28 | 29 | 30 | 31 |
Tags
- NLP
- ddpm
- Font Generation
- 모션매칭
- Diffusion
- 생성모델
- WinAPI
- 디퓨전모델
- BERT
- Unreal Engine
- CNN
- WBP
- GAN
- multimodal
- 폰트생성
- Generative Model
- dl
- 언리얼엔진
- userwidget
- UE5
- cv
- ue5.4
- RNN
- motion matching
- animation retargeting
- 딥러닝
- deep learning
- 오블완
- Stat110
- Few-shot generation
Archives
- Today
- Total
Deeper Learning
You Only Look Once: Unified, Real-Time Object Detection 본문
2016, University of Washington, Allen Institute for AI, Facebook AI Research
source: https://arxiv.org/pdf/1506.02640.pdf
Abstract
- YOLO, obejct detection을 위한 새로운 method를 제시
- 이전 연구들은 classifier를 detection을 위해 사용하였으나 YOLO는 object detection을 spatially separated bbox와 해당하는 bbox의 class probabilities를 예측하는 regression 문제로 정의
- 하나의 신경망 모델이 full image에서 one-stage로 bbox와 class probabilities를 예측
- 전체 detection 파이프라인이 하나의 network에서 이루어지는 end-to-end 모델
- 초당 45 frames을 detection 할 수 있는 real-time object detection
- 작은 버전의 network Fast YOLO는 초당 155 frames을 detection 가능하며 이전 real-time detector의 2배의 mAP를 달성
- SOTA와 비교하였을 때 localization에서 성능이 조금 떨어지나 background에 bbox를 생성하는 false positive error는 감소
- object의 일반적인 representations을 학습하는데 DPM, R-CNN보다 뛰어난 성능, natural images 뿐만 아니라 artwork에서도 좋은 성능
1. Introduction
- 인간은 이미지를 보자마자 무슨 object가 어디에 있고 어떻게 상호작용 하는지 바로 알 수 있음
- 빠르고 정확한 object detection 알고리즘은 많은 분야에 유용하게 활용할 수 있음
- 이전 detection system은 classifier를 detection 목적으로 사용
- classifier를 사용하여 image의 여러 location과 scale에서 classify
- DPM: sliding window를 사용하여 전체 이미지를 탐색
- R-CNN: region proposal을 사용하여 먼저 가능성 있는 bbox를 만들고 proposed bbox에서 classifier를 사용 → 겹치는 detection, rescore와 같은 post-processing 과정을 통해 bbox를 조정
- 각 component를 따로 학습하여야 하기 때문에 느리고 optimize도 어려움
- YOLO는 object detection을 single regression problem으로 정의 (input image → bbox coordinates, class probabilities)
- object와 그 위치를 한번에 예측 가능 (you only look once)

- YOLO는 매우 간단하며 단일 conv network로 동시에 bbox와 class probabilities를 예측하며 full image에서 바로 detection performance를 optimize: Unified model
- unified model은 전통적인 object detection method에 비해 여러 장점을 가짐
- Extremely fast
- 복잡한 파이프라인이 필요없음
- YOLO의 fast version의 경우 150 fps를 소화할 수 있으며 25 milliseconds latency의 video에서도 real-time object detection이 가능함
- 이전 real-time object detection method에 비해 2배 이상의 mAP 달성
- 이미지를 전역적으로 판단
- sliding window, region proposal-based techniques과 다르게 YOLO는 train, test 과정에서 전체 이미지를 봄으로써 class에 대한 부분적인 외형뿐만 아니라 contextual information도 implicit 하게 인코딩
- Fast R-CNN은 더 큰 context를 보지 못하기 때문에 background patch를 object로 인식하는 오류가 YOLO보다 빈번함
- objects의 일반화 가능한 representations을 학습
- natural image로 학습하고 artwork에서 test 하였을 때 YOLO의 성능이 DPM, R-CNN의 성능을 크게 상회
- 새로운 도메인이나 예기치 못한 input에 대한 일반화 성능이 뛰어남
- Extremely fast
- SOTA detection systems에 비해 정확도가 다소 떨어짐
- 작은 object에서 localization 성능이 떨어짐
2. Unified Detection
- object detection의 separate components를 single neural network에 통합
- 전체 이미지의 feature를 사용하여 모든 classes의 모든 bbox를 동시에 예측
- input image를 S x S grid로 나눔
- 만약 object의 중앙점이 어떤 grid cell 내부에 있다면, 그 grid cell은 object를 detect 하여야 함
- 각 grid cell은 B개의 bbox와 각 bbox에 해당하는 confidence를 예측
- confidence score는 box에 obejct가 있는지, box가 얼마나 정확한지에 대한 모델의 confidence
- confidence score는 $Pr(Object) * IOU^{truth}_{pred}$ 로 정의
- grid cell에 object가 없다면 confidence score는 0이 되어야 함
- grid cell에 object가 있다면 ground truth와 predicted box의 IOU가 confidence score가 되어야 함
- 각 bbox는 5개의 predictions을 포함: x, y, w, h, confidence
- (x, y)는 box의 중앙 좌표로 grid cell 경계 기준 상대 좌표
- w = width, h = height 전체 이미지 기준 상대적
- confidence = (ground truth box와 predicted box의 IOU)
- 각 grid cell은 C개의 conditional class probabilities를 예측
- $Pr(Class_i|Object)$
- 하나의 grid cell이 포함하는 bbox의 수 B에 관계없이 한 set의 class probabilities를 예측
- Test time 때는 conditional class probabilities와 각 box의 confidence prediction을 곱함
- $Pr(Class_i|Object) * Pr(Object) * IOU^{truth}{pred} = Pr(Class_i) * IOU^{truth}{pred}$
- 하나의 grid에 해당하는 최종 output (C = 5, B = 2)
- [b1_confidence, b1x, b1y, b1w, b1h, b2_confidence, b2x, b2y, b2w, b2h, C1, C2, C3, C4, C5], 5 * B + C
- b1_confidence를 C1 ~ C5에 곱하여 bbox1에 대한 최종 class-specific confidence score를 도출
- class-specific confidence는 box에 해당 class의 object가 존재할 확률과 bbox가 object에 얼마나 잘 맞는지를 나타냄
- PASCAL VOC 데이터셋에서 S=7, B=2, C=20 → 최종 output tensor의 shape는 S x S x (B * 5 + C) = 7 x 7 x 30

2.1. Network Design
- GoogLeNet에서 영감을 받음
- 24 conv layers → 2 fc layers
- Inception 모듈 대신 1x1 reduction layer + 3x3 conv layers를 사용(NiN 구조와 유사)

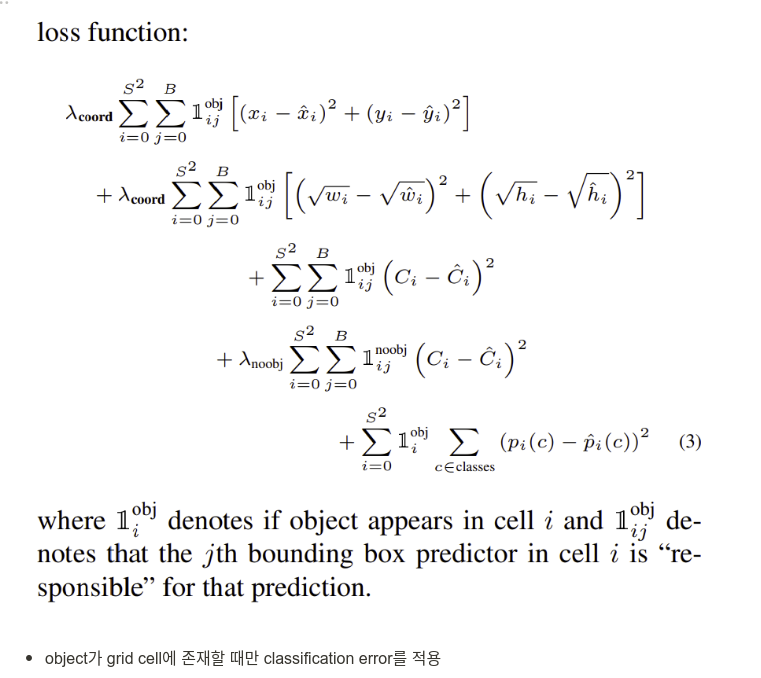
2.2. Training
- 1000-class ImageNet에서 pretrain
- conv, fc layer를 pretrained network에 추가하면 성능을 높일 수 있다는 이전 연구에 따라 randomly initialized 된 4개의 conv layer와 2개의 fc layer를 pretrained network에 추가
- width와 height는 image size에 따라 normalized 되어 0 ~ 1의 값을 가짐
- x와 y는 grid cell에서 위치를 나타내는 offset으로 0 ~ 1의 값을 가짐
- final layer에서는 linear activation function을 사용 나머지 layer에서는 0.1 leaky ReLU를 사용
- sum-squared error
- 모든 이미지에서 많은 grid cell은 object를 포함하고 있지 않기 때문에 confidence score를 0으로 밀어버리면서 object가 있는 grid cell의 유의미한 gradient를 압도하는 상황이 발생
- $\lambda_{coord}$ = 5, $\lambda_{noobj}$ = 0.5로 설정하여 안정적인 학습을 유도
- 큰 box에서 Sum-squared error는 작은 box에서 error와 동일한 가중치를 가짐
- $(100-104)^2 = (5 -1) ^2$
- 큰 box에서 작은 수치의 error는 작은 box의 그것보다 중요하지 않음
- width, height를 바로 예측하는 것이 아닌 squared root를 예측
- $(\sqrt{100} - \sqrt{104})^2 < (\sqrt{5} - \sqrt{1})^2$
2.3. Inference
- 대부분 object가 특정 grid cell에 소속되어 object마다 1개의 box가 생성
- 그러나 큰 object, grid 경계에 걸쳐있는 object의 경우 여러 개의 box가 생길 수 있음, Non-maximal suppression (NMS)를 사용하면 2~3%의 mAP 증가
2.4. Limitations of YOLO
- YOLO는 grid마다 1개의 class만 가질 수 있는 2개의 box만 예측하는 강한 공간적 제약을 가짐
- 이러한 제약이 근접한 다른 작은 objects를 탐지하는데 악영향을 줌
- data에서 bounding box 예측을 학습하기 때문에 특이한 비율의 object에 일반화 성능이 좋지 않음
- input image에 많은 downsampling layer를 통과시키기 때문에 비교적 coarse features를 사용
- IOU를 사용하기 때문에 large box에서 error보다 small box에서 error가 훨씬 크게 loss에 영향
- incorrect localizations이 error의 주요 원인
3. Comparison to Other Detection Systems
DPM
- sliding window
- pipeline: extract static features, classify regions, predict bounding boxes
- YOLO는 통합된 단일 네트워크를 사용하여 빠르고 더 정확
R-CNN
- region proposal by Selective Search algorithm
- complex pipeline, 0.25 fps
- YOLO도 potential bounding boxes를 each grid cell에서 제안
- YOLO는 proposal bounding boxes가 R-CNN의 2000개에 비해 98개로 훨씬 적으며 파이프라인을 통합하여 빠름
Other Fast Detectors
- Fast & Faster R-CNN은 Selective Search의 문제를 해결하고자 structure를 수정하여 R-CNN을 빠르게 만듦, 그러나 Real-Time을 소화하기에 느린 속도가 문제
- DPM의 속도를 높이기 위한 많은 연구가 있었음. HOG computation의 속도를 증가시킨 연구가 많았으나 마찬가지로 Real-Time을 하기에 느린 속도
- YOLO는 파이프라인 자체를 버리고 한 번에 빠른 예측이 가능
Deep MultiBox
- YOLO와 마찬가지로 RoI를 예측하기 위해 cnn을 사용
- 그러나 detection pipeline의 구조를 벗어나지 못함
OverFeat
- 효율적으로 sliding window를 적용하였으나 여전히 pipeline 구조 유지
- localization을 최적화하는 method로 localizer는 오직 local information만 고려
- global context를 볼 수 없어 post-processing이 필요
MultiGrasp
- Grid 접근법이 유사
- 하나의 object를 포함하는 image의 single graspable region만 예측
4. Experiments
4.1. Comparison to Other Real-Time Systems

4.2. VOC 2007 Error Analysis

- Error Analysis
- Correct: correct class and IOU > 0.5
- Localization: correct class and 0.1 < IOU < 0.5
- Similar: class is similar, 0.1 < IOU
- Other: class is wrong, IOU > 0.1
- Background: IOU < 0.1
- YOLO의 경우 False Positive인 Background error가 작지만 localization 성능이 떨어진다
4.3. Combining Fast R-CNN and YOLO

- Fast R-CNN의 localization 성능과 YOLO의 낮은 False Positive 성능을 얻기 위한 모델 결합
- YOLO를 사용하여 Fast R-CNN의 background detection을 제거
- 두 알고리즘이 비슷한 bbox를 예측했다면 YOLO의 prediction probability 만큼 boost를 부여
- 성능이 크게 향상하였음
- 단지 ensemble의 효과가 아님을 증명하기 위해 다른 Fast R-CNN 모델과의 Combined 성능도 측정 → YOLO와 combine 하였을 때만 성능이 크게 향상
4.4. Generalizability: Person Detection in Artwork

5. Real-Time Detection In The Wild
- YOLO는 Real-Time이 가능한 속도
- http://pjreddie.com/yolo/
YOLO: Real-Time Object Detection
YOLO: Real-Time Object Detection You only look once (YOLO) is a state-of-the-art, real-time object detection system. On a Pascal Titan X it processes images at 30 FPS and has a mAP of 57.9% on COCO test-dev. Comparison to Other Detectors YOLOv3 is extremel
pjreddie.com
6. Conclusion
- Unified object detection model: YOLO를 제시
- 구조가 간단하며 full images에 바로 학습 가능
- classifier-based 접근법과 다르게 detection performance와 직접적인 관련이 있는 loss를 사용하여 전체 모델을 한번에 학습
- Fast YOLO는 SOTA object detector
- 다른 도메인에 일반화 성능이 뛰어남
정리
- object detection의 전체 pipeline을 통합한 one-stage detection method YOLO를 제시
- 기존 method에 비해 성능은 크게 떨어지지 않으며 Real-Time detection이 가능한 매우 빠른 속도
- 뛰어난 일반화 성능
- demo와 source code를 함께 공개
- Grid cell을 사용하여 object, grid cell이 1:1 mapping 관계이며 한 grid cell에는 오직 하나의 class의 object가 존재한다는 제약이 속도를 높여주나 localization 성능을 감소시켰을 것
- 한 번에 classification과 bbox regression 학습을 성공, one-stage detection 관련 후속 논문이 매우 많았을 듯 함
'AI > Deep Learning' 카테고리의 다른 글
'AI/Deep Learning' Related Articles
more




Comments